

圖——直升機煙尾跡飛行表演
本題目的上一篇主要講了旋翼槳盤氣動迎角的分布,分析了槳尖區域氣動迎角為負值的原因,并對反流區的氣動現象進行了補充說明,在本篇中,將會接續上一篇的內容,對直升機的總距和周期變距操縱、兩種典型的機動飛行狀況以及失速和壓縮性問題進行論述。
總距和周期變距操縱
槳盤迎角分布的平均值決定了旋翼拉力的大小,而槳盤迎角的不均勻分布則實現了俯仰力矩和滾轉力矩的平衡。將迎角與直升機的操縱量對應起來可以發現,槳盤迎角分布的平均值由總距操縱所決定,合適的總距大小能夠產生適當的誘導速度,使得氣流穿過槳盤,為旋翼產生氣動拉力而提供能量。
在懸停狀態下,旋翼全部的槳盤入流速度都是由誘導速度組成,而在前飛過程中給,由于槳盤存在一定的前傾角,因而前飛來流的速度會在槳盤上有一個與誘導速度方向相同的垂直槳盤分量,這個來流速度的分量和誘導速度共同組成了前飛槳盤入流,顯然,隨著前飛速度的增加,這個來流分量也會逐漸增加,因而誘導速度得以逐漸減小,因而總距也得以減小,從宏觀上來看,總距的變化,與直升機前飛需用功率曲線的變化成正比(關于直升機需用功率曲線,可以查閱我之前關于直升機前飛性能的文章,此處不再論述)。
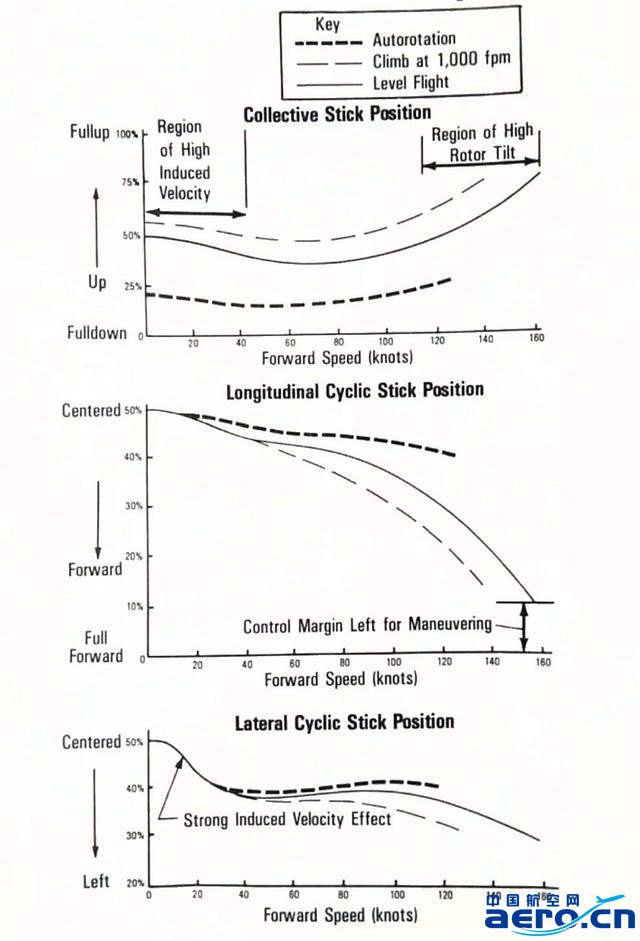
圖——直升機前飛過程中的操縱量變化
從直升機前飛過程中操縱量變化的曲線圖可以看到總距以及用于配平的縱橫向周期變矩量在前飛、爬升和自轉過程中的變化。
縱向周期變距操縱是用來平衡前行側和后行側槳葉的槳距以此來補償氣流速度的非對稱分布。駕駛員通過前后推拉變距操縱桿實現縱向周期變距。
橫向周期變距改變了槳盤頭部和尾部的槳距,以此來補償旋翼錐度和誘導速度的前后分均勻分布導致的氣流速度非堆成分布。駕駛員通過左右推拉變距操縱桿實現橫向周期變距。
縱橫向周期變距的操縱量都是隨著前飛速度的增大而增大,對于常規的右旋直升機而言,其操縱方向分別是向前和向左。一般認為橫向周期變距桿在低速飛行時曲線上的陡峭變化的原因是誘導速度非均勻分布導致的。
Prouty 表示,他在繪制這一副操縱量與前飛速度的關系圖的時候,忽略了用于平衡機身氣動力或者重心偏置力矩所需用的揮舞量。在他的計算中,旋翼任何抬頭都會減小揮舞前推桿的位移量(注:此處未必完全正確),而假如旋翼槳盤因揮舞而向左側傾斜,則其左推桿就會小一些。
機動飛行

圖——直升機機動飛行
從穩定飛行的狀態中轉入到機動飛行的狀態會導致槳盤氣動迎角的改變。對于絕大多數機動飛行狀態而言,旋翼的拉力都是要大于穩定飛行中旋翼拉力的,因此,旋翼槳葉就會有更高的平均迎角,從而,機動飛行中,槳葉局部甚至大范圍失速的情況都有可能會發生。而在機動飛行中,有兩個機動動作尤其值得關注:拉起和轉彎。
在常規的直升機拉起飛行中,往往只操縱變距桿——就是說后拉變距桿——就像固定翼飛行器的操縱一樣,通過后拉變距桿,旋翼槳盤后倒,瞬時拉力因而增大,直升機實現拉起機動。在該機動過程中,槳盤后倒導致大量的前飛來流變為上洗氣流,自下而上地穿過槳盤平面,相當于變相增大了槳葉的平均氣動迎角,從而增大了拉力,此外,上洗氣流的存在,使得整個槳盤的氣動迎角分布更接近于自轉狀態,參考我上一篇文章的內容,可以知道自轉狀態下,最大迎角都集中在后行側靠近槳根區域,即便失速,對旋翼影響也不大。
而在穩定的轉彎機動中,拉力的增量必須同時平衡直升機的重力和轉彎的離心力,因此,必須提總距,這一操作不僅增大了槳葉的平均氣動迎角,并且使得槳葉最大氣動迎角區域向著后行側外部移動——就如同上文中所講到的爬升狀態氣動迎角分布一樣。從這個角度來看,假設某次轉彎和拉起在同意前飛速度下實現,直升機拉力都達到兩倍重力,那么轉彎更容易進入后行側槳葉失速的狀態中。
失速和壓縮性
直升機和固定翼飛機的失速和壓縮性問題的側重點是有區別的,下面我先說區別在哪,然后進行解釋。
當一架固定翼飛行器失速的時候,主要后果就是其機翼產生的升力大幅下降——當一側機翼比另一側提前失速的話,問題就更嚴重了——相比之下,因失速帶來的低頭俯仰力矩只是個小問題而已。但是直升機失速則不同,對直升機槳葉失速而言,升力損失不算什么,產生的低頭俯仰力矩才是重點。
中國航空網 www.k6050.com
航空翻譯 www.aviation.cn
本文鏈接地址:直升機操縱為何比固定翼更復雜?旋翼氣動環境方面的解釋




