北京時(shí)間4日23:30,埃塞俄比亞當(dāng)?shù)貢r(shí)間18:30,埃塞俄比亞民航局作為埃塞航ET302航班事故調(diào)查小組的主導(dǎo)者,公布了事故初步調(diào)查報(bào)告(preliminary report),我們第一時(shí)間為大家?guī)斫庾x。
為了方便大家更好地理解文章內(nèi)容,我們先介紹幾個(gè)背景知識(shí)。
背景知識(shí)1
什么是水平安定面、升降舵
以飛機(jī)重心為受力點(diǎn),飛機(jī)通過調(diào)節(jié)水平尾翼(包括水平安定面和升降舵)的升力大小來控制飛機(jī)俯仰(抬頭/低頭)——玩過蹺蹺板的可以腦補(bǔ)一下。
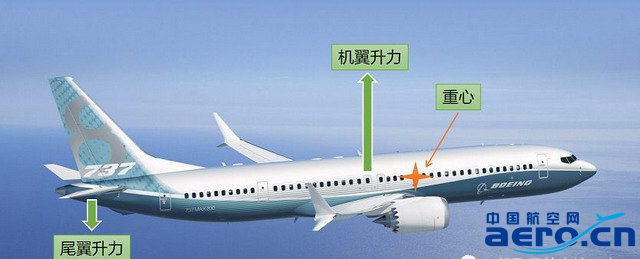
水平尾翼中,前面面積較大的叫做水平安定面(HorizontalStabilizer),后面面積稍小的叫做升降舵(elevator)。
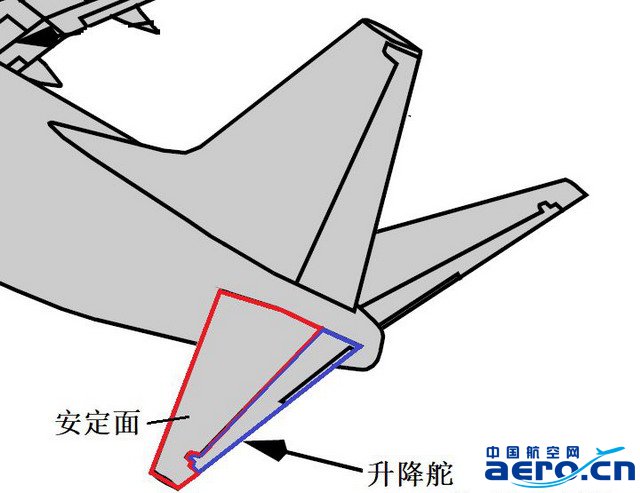
水平安定面面積比升降舵更大,俯仰控制效能更高,同樣的俯仰改變效果所需要調(diào)整的角度比升降舵更小,使用配平驅(qū)動(dòng)的控制方式,以達(dá)到更精準(zhǔn)的控制效果。
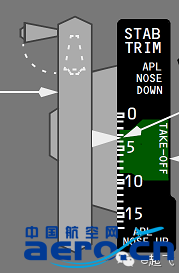
B737NG/MAX飛機(jī)的水平安定面的移動(dòng)范圍是——
從“中立位”開始,
向上 4.2° 水平安定面“前緣上止位”(飛機(jī)低頭配平-AND);
向下12.9°水平安定面“前緣下止位”(飛機(jī)抬頭配平-ANU)。
下圖左側(cè)的三個(gè) “-” 標(biāo)記從上到下分別代表著“前緣上止位、中立位、前緣下止位”

下圖是B737的安定面配平刻度表。
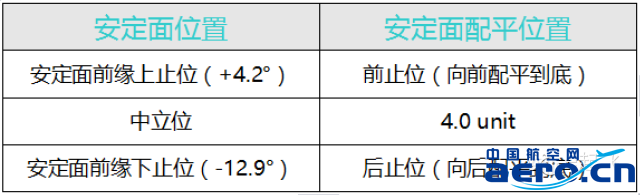
而安定面位置和安定面配平的對(duì)應(yīng)關(guān)系是:
背景知識(shí)2
B737俯仰控制
對(duì)于737(CL/NG/MAX)飛機(jī),飛行員通過前后移動(dòng)駕駛桿,控制飛機(jī)的升降舵的角度。飛機(jī)自動(dòng)駕駛和飛行員人工通過電動(dòng)或者人工配平安定面,控制水平安定面的角度。安定面配平可以電動(dòng)控制(自動(dòng)駕駛和人工電動(dòng)配平),也可以人工控制(手搖配平輪)。
B737的安定面配平一共有三種模式:
自動(dòng)駕駛電動(dòng)配平;
人工電動(dòng)配平——通過駕駛桿上的配平電門;
人工手動(dòng)配平——通過轉(zhuǎn)動(dòng)配平輪進(jìn)行配平。
當(dāng)安定面配平開關(guān)切斷后,只能通過最后的人工手動(dòng)配平模式,通過轉(zhuǎn)動(dòng)配平輪進(jìn)行配平。

737NG駕駛艙,操縱系統(tǒng)原理與737MAX一致
水平安定面的作用是:
1、當(dāng)飛行員/自動(dòng)駕駛需要在桿(升降舵)上持續(xù)地施加一個(gè)力量(不論推桿還是拉桿)才能獲得希望的俯仰狀態(tài)時(shí),可以人工調(diào)整、或者由飛機(jī)系統(tǒng)自動(dòng)調(diào)整安定面的角度,幫助減小俯仰操縱的力量需求——飛得更輕松。
2、當(dāng)飛機(jī)處于危險(xiǎn)的大迎角狀態(tài)時(shí)(接近失速),飛機(jī)也可以自動(dòng)調(diào)整安定面的角度,幫助減小迎角,避免失速——避免失速危險(xiǎn)。
”失速“概念參見前文《波音B737發(fā)現(xiàn)“未被告知的新BUG”?》
這就是安定面的安定(stabilize)作用。我們現(xiàn)在可以理解,這個(gè)部件之所以稱之為安定面Stabilizer,是因?yàn)檫@個(gè)部件的作用就是用來起stabilize(安定、穩(wěn)定)的作用,提高飛機(jī)俯仰方向(抬頭/低頭)的安定/穩(wěn)定性(stability)。

——報(bào)告正文——
編者注:內(nèi)容根據(jù)報(bào)告原文翻譯,編排稍有調(diào)整(報(bào)告原文有個(gè)別處時(shí)間軸未按時(shí)間順序),文末可下載事故初步調(diào)查報(bào)告原文。
報(bào)告正文-事件經(jīng)過
注:
1、以下經(jīng)過是基于DFDR(飛行數(shù)據(jù)記錄器)、CVR(駕駛艙語音記錄器)和ATC(空中交通管制)通話的初步分析。隨著調(diào)查的繼續(xù),可能會(huì)在最終報(bào)告發(fā)布之前進(jìn)行修訂和更改。
2、時(shí)間均為世界協(xié)調(diào)時(shí)UTC,當(dāng)?shù)貢r(shí)間為UTC+3,北京時(shí)間為UTC+8。
05:37:34,ATC給ET-302航班發(fā)布起飛許可,并指揮其起飛后聯(lián)系119.7 MHz。
大約05:38,飛機(jī)從07R跑道開始起飛滑跑,機(jī)場(chǎng)標(biāo)高2333.5米,飛機(jī)襟翼設(shè)置為5(e起飛注:原文為5°,此處修改),安定面配平設(shè)置為5.6個(gè)單位。起飛滑跑表現(xiàn)正常,左右迎角(AOA)數(shù)值正常。起飛推力穩(wěn)定在約94%N1,與N1基準(zhǔn)值相匹配。隨后的絕大部分時(shí)間里,N1基準(zhǔn)值保持在94%左右,并且油門沒有移動(dòng)。N1基準(zhǔn)值在記錄結(jié)束前220秒指示消失。根據(jù)DFDR記錄的控制桿力和CVR記錄,機(jī)長(zhǎng)是操縱飛機(jī)的飛行員。
05:38:43,飛機(jī)到達(dá)無線電高度大約50英尺,飛行指引儀橫滾模式改為L(zhǎng)NAV。(e起飛注:這意味著飛機(jī)在開始起飛前預(yù)位了LNAV模式。)
05:38:44,離地后不久,左右記錄的AOA值出現(xiàn)偏差。左AOA下降至11.1°然后增加至35.7°,而右AOA值顯示14.94°。隨后,左AOA值在3/4秒內(nèi)達(dá)到74.5°,而右AOA達(dá)到最大值15.3°。此時(shí),左抖桿器被激活(注:表示失速告警)并一直工作直到接近記錄結(jié)束。此外,左側(cè)的空速、高度和飛行指引儀俯仰指示與右側(cè)對(duì)應(yīng)指示出現(xiàn)偏差。左側(cè)值低于右側(cè)值,直到接近記錄結(jié)束。
05:38:46,無線電高度大約200英尺,飛機(jī)主警告(Master Caution)顯示,CVR里記錄了副駕駛的喊話“Master Caution Anti-Ice”(主警告-防冰)。4秒鐘后,記錄的左側(cè)AOA加溫的參數(shù)改變了狀態(tài)(e起飛注:即左側(cè)AOA加溫故障)。
05:38:58,無線電高度大約400英尺,飛行指引儀俯仰模式改為VNAV SPEED(e起飛注:這意味著飛機(jī)在開始起飛前預(yù)位了VNAV模式),并且機(jī)長(zhǎng)喊話“Command”(接通自動(dòng)駕駛的標(biāo)準(zhǔn)喊話),同時(shí)記錄到自動(dòng)駕駛儀警告。(e起飛注:無線電高度400英尺為波音程序規(guī)定的起飛后接通自動(dòng)駕駛的最低高度,一般推薦1000英尺以上再接通自動(dòng)駕駛。出現(xiàn)自動(dòng)駕駛警告,意味著機(jī)長(zhǎng)第一次嘗試接通自動(dòng)駕駛時(shí)沒有成功,原因可能是未配平好飛機(jī),或者系統(tǒng)本身故障。)
05:39:00,機(jī)長(zhǎng)喊話“Command”。
05:39:01,無線電高度大約630英尺,記錄第二次自動(dòng)駕駛儀警告(e起飛注:機(jī)長(zhǎng)第二次嘗試接通自動(dòng)駕駛時(shí)沒有成功)。
05:39:06,機(jī)長(zhǎng)指揮副駕駛聯(lián)系(離場(chǎng)ATC)雷達(dá),副駕駛報(bào)告飛機(jī)按SHALA 2A離場(chǎng)、通過8400英尺高度并向目標(biāo)高度FL320(32000英尺)爬升。(e起飛注:SHALA為南向的離場(chǎng)航路點(diǎn),但目前搜集到的航圖資料里僅有SHALA 1A和1B兩種離場(chǎng)程序,根據(jù)報(bào)告后文描述,應(yīng)為副駕駛口誤)
在離地到1000英尺AGL(離地高度)高度之間,安定面位置在4.9至5.9單位之間移動(dòng),與手動(dòng)電動(dòng)配平輸入一致。(e起飛注:即機(jī)組在這個(gè)過程中使用人工電動(dòng)配平是有效的)。
中國航空網(wǎng) www.k6050.com
航空翻譯 www.aviation.cn
本文鏈接地址:專業(yè)解讀:埃塞航737MAX事故初步調(diào)查報(bào)告出爐


